仿生蛙机器人
Table of Contents
另一种游泳方式:基于气动系统的轻量级仿生蛙机器人
概述#
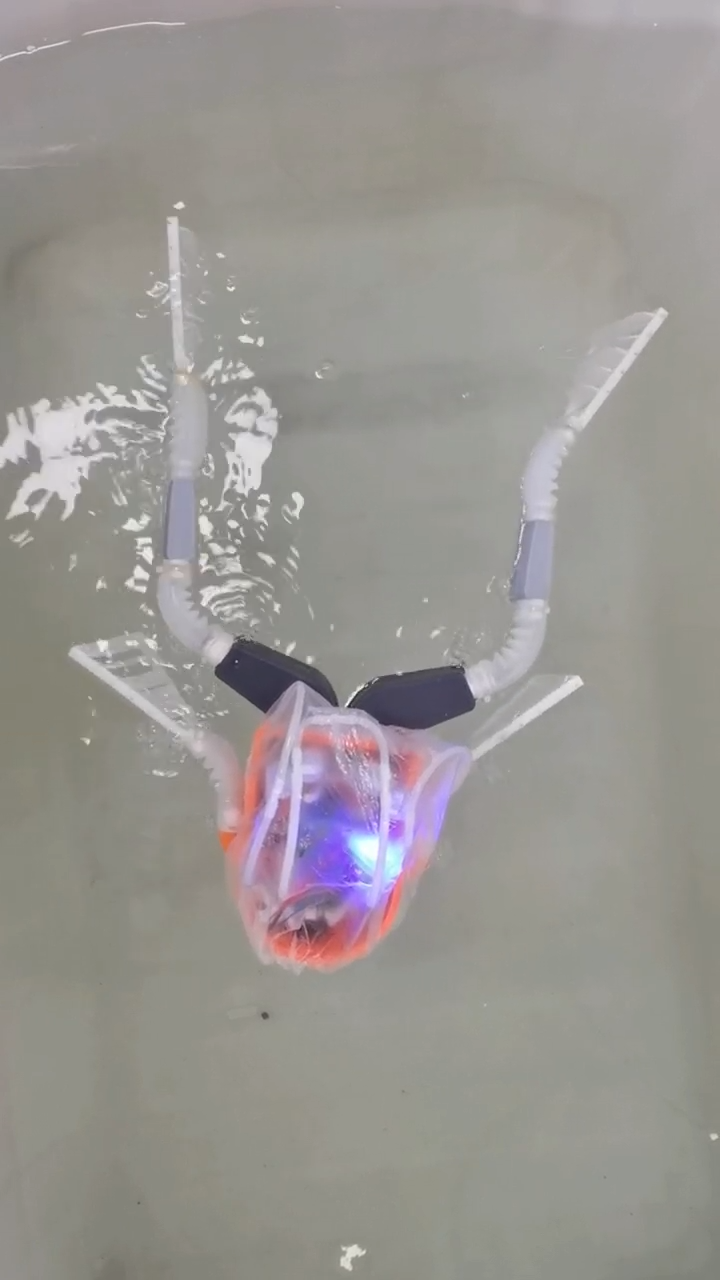
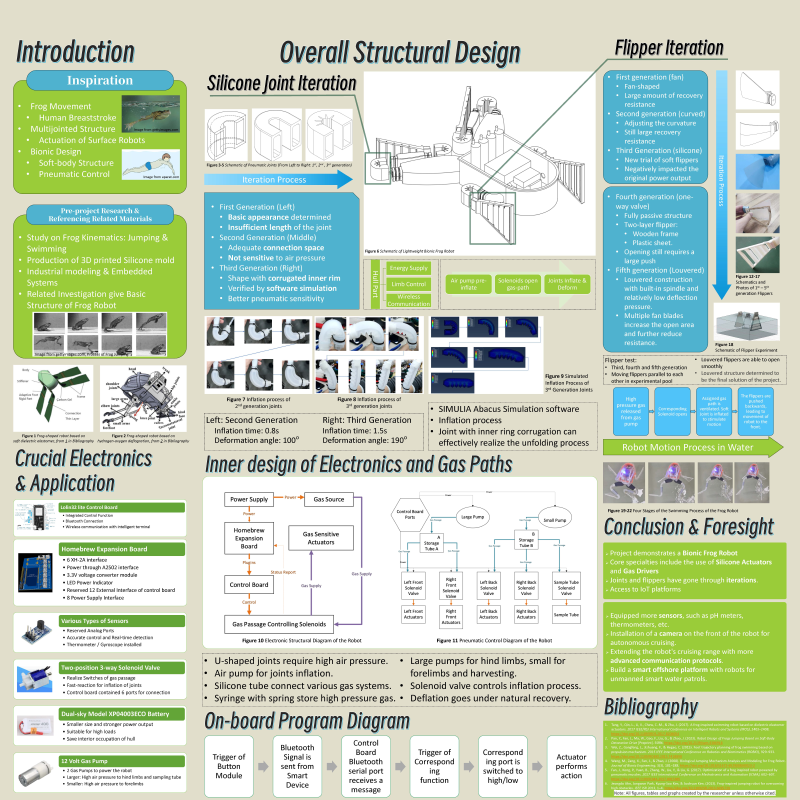
本项目研发了一款以压缩气体驱动气动软体执行器的轻量级仿生蛙机器人。机器人模拟青蛙的游泳动作,通过在内部气压下发生形变的尺蠖形硅胶关节在水面运动,产生推进力并实现方向控制。
该项目以中国国家代表团成员身份参加了 2024 年洛杉矶 Regeneron 国际科学与工程大奖赛(ISEF 2024),项目编号为 ROBO029,类别为机器人与智能机器。
研究动机#
具备水面机动能力的水上漂浮机器人,可作为水生研究、环境监测和水样采集的有效平台。与刚性水下机器人相比,软体气动执行器具有以下优势:
- 顺应性 — 与水生环境的安全交互
- 轻量结构 — 适合水面操作
- 仿生运动 — 受真实青蛙启发的高效游泳步态
系统架构#
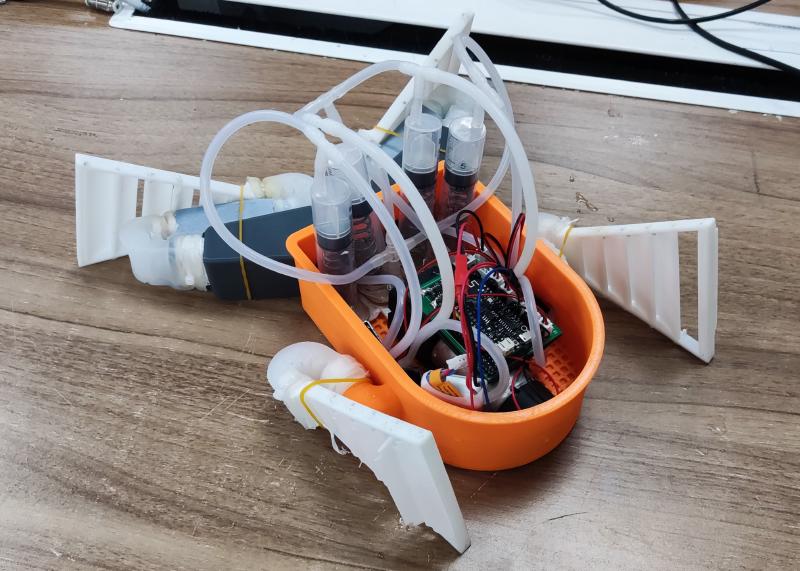
机器人由两个主要子系统组成:位于主体内的控制模块和分布于四肢的运动模块。
气动系统#
- 双气泵(大泵 + 小泵)通过储气注射器提供气压
- 5 个电磁阀分别独立控制四个肢体关节和一个采样腔
- 气管从主体延伸至每个硅胶软体关节
- 控制板管理阀门时序,协调游泳步态
软体执行器#
- 第五代硅胶软体关节 — 蠕虫形气动执行器
- 多层构造,内嵌约束结构以实现可控形变
- 经历了多次设计迭代,包含软体仿真、元器件测试和整机验证
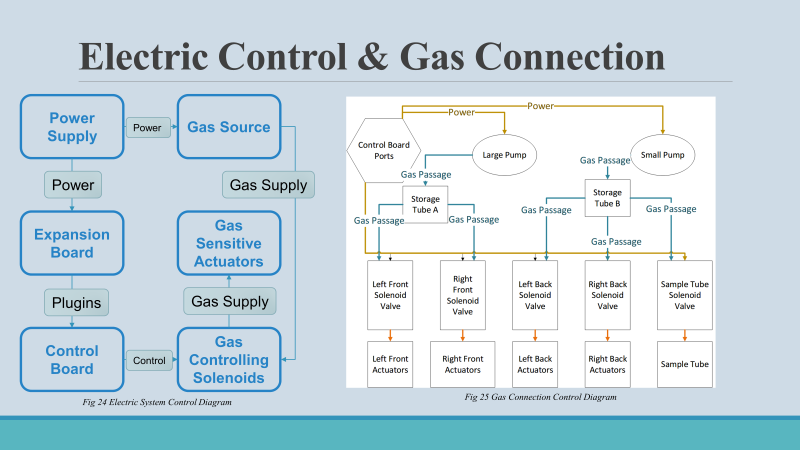
电子与控制#
- 基于低功耗 ESP32 的控制板
- 蓝牙连接,支持智能手机无线操控
- 扩展板套件,用于传感器集成
- 通过固件控制电磁阀驱动时序
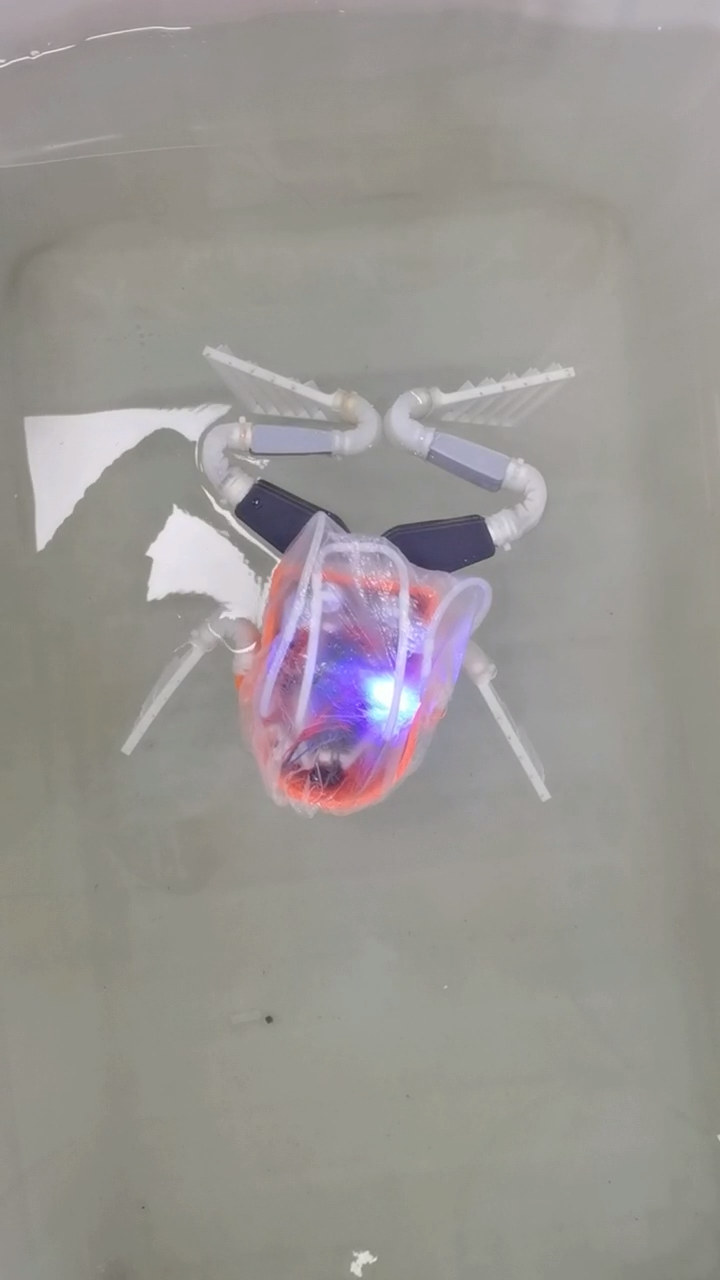
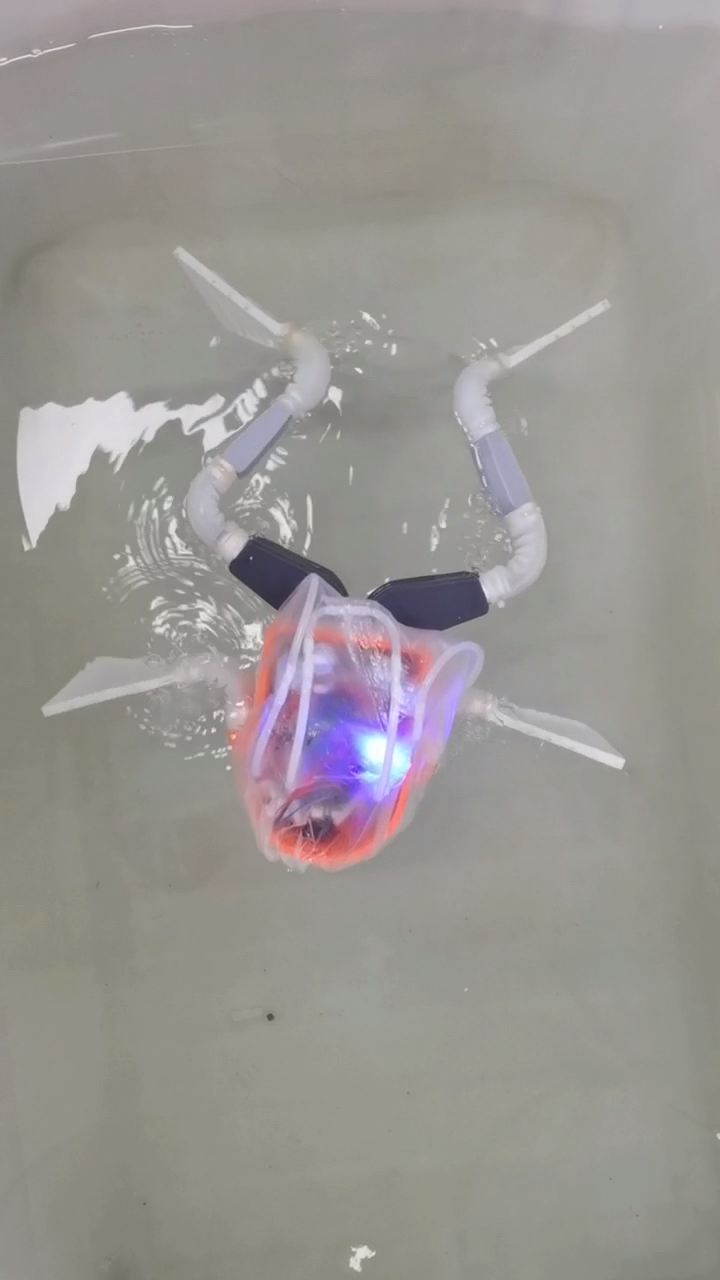
游泳性能#
机器人通过协调四肢驱动,在静水中实现约 0.04 m/s 的运动速度。方向控制通过左右肢体冲程的差速时序实现。
四象限图#
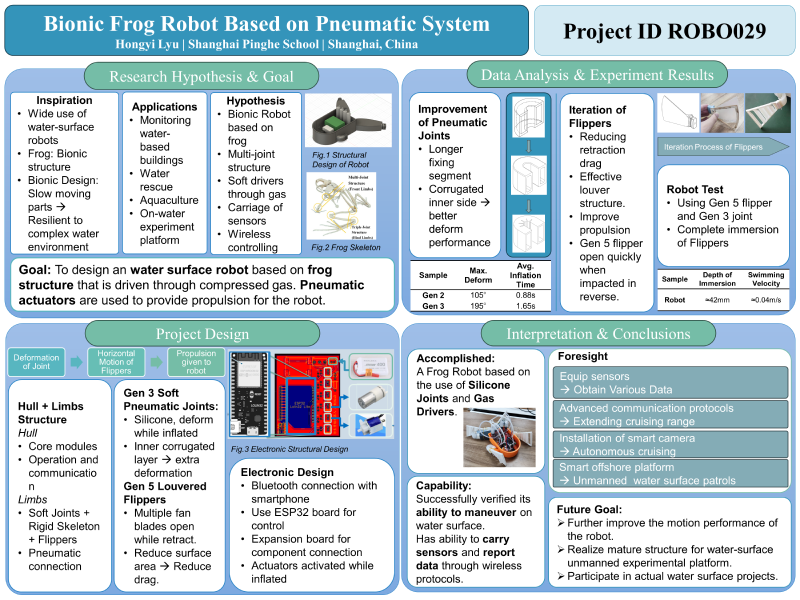
主要成果#
- 成功验证了机器人在水面机动的能力
- 可携带采样管进行水质数据采集
- 通过蓝牙智能手机接口实现无线控制
- 板载遥测系统进行传感器数据报告
未来目标#
- 通过优化软体关节几何形状提升运动性能
- 优化弹性结构以提高水面顺应性
- 拓展商业和教育平台潜力
- 参与进一步的水面机器人研究
ISEF 展示板#
There are no articles to list here yet.