Bionic Frog Robot
Table of Contents
Overview#
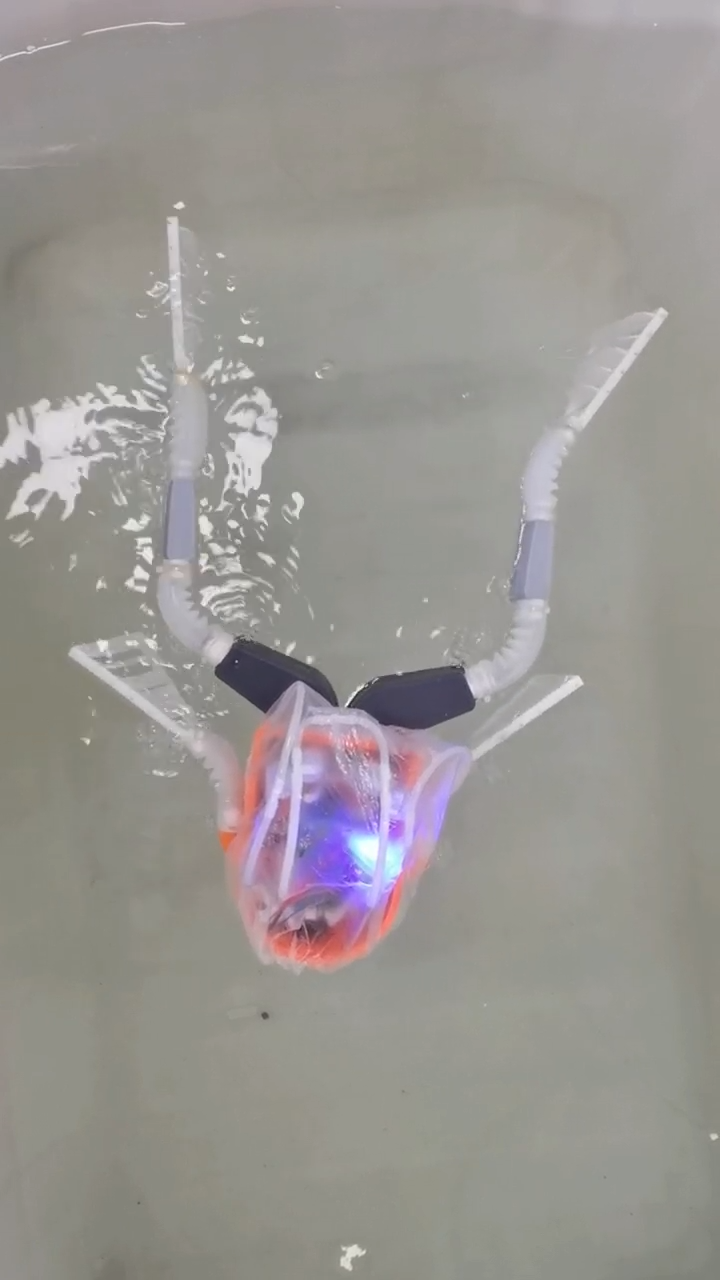
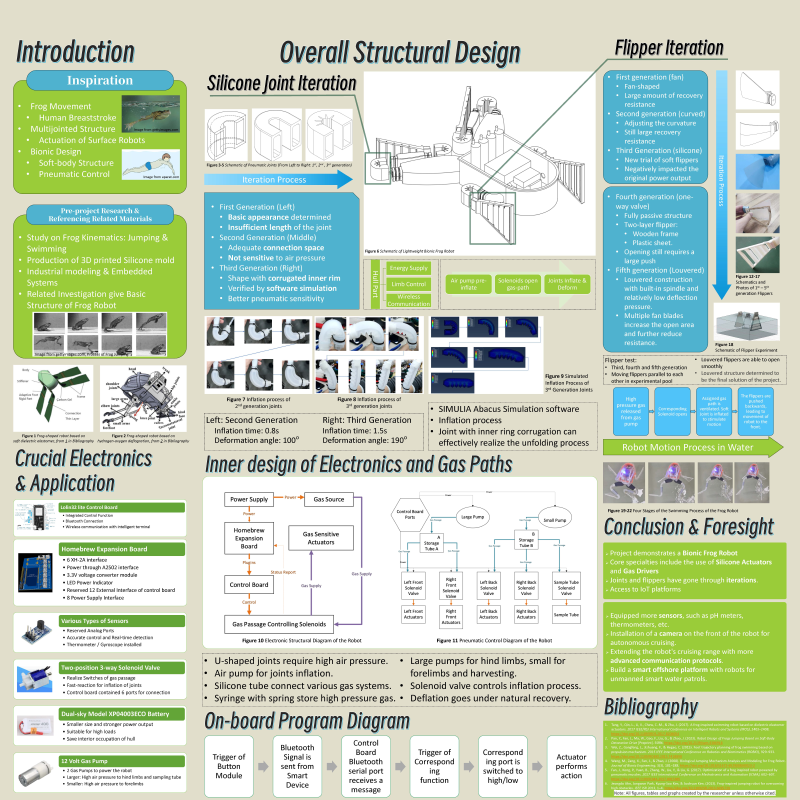
This project presents a lightweight bionic frog robot driven by compressed gas through pneumatic soft-body actuators. Designed to mimic the swimming motion of a frog, the robot operates on the water surface using inchworm-shaped silicone joints that deform under internal air pressure — generating propulsion and enabling directional control.
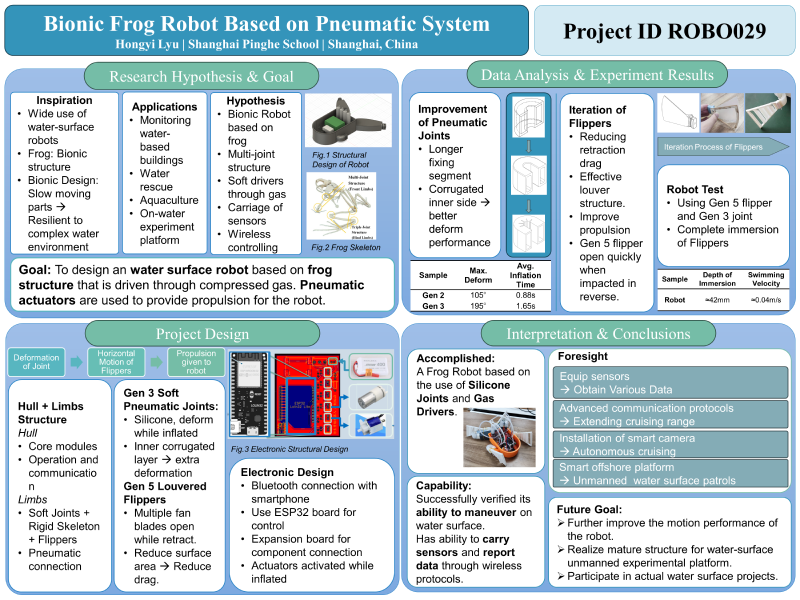
The project was presented at the Regeneron International Science and Engineering Fair (ISEF) 2024 in Los Angeles as part of the China national team delegation, under Project ID ROBO029 in the Robotics and Intelligent Machines category.
Research Motivation#
Water-floating robots with surface maneuverability can serve as effective platforms for aquatic research, environmental monitoring, and water sampling. Unlike rigid-bodied underwater robots, soft-body pneumatic actuators offer:
- Compliance — safe interaction with aquatic environments
- Lightweight construction — suitable for surface operation
- Biomimetic locomotion — efficient swimming gait inspired by real frogs
System Architecture#
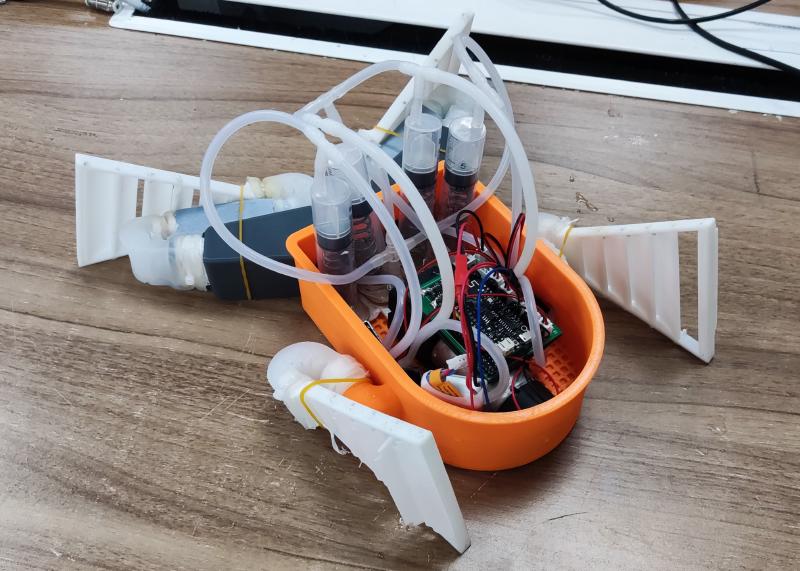
The robot consists of two main subsystems: a control module housed in the main body and a motion module distributed across the four limbs.
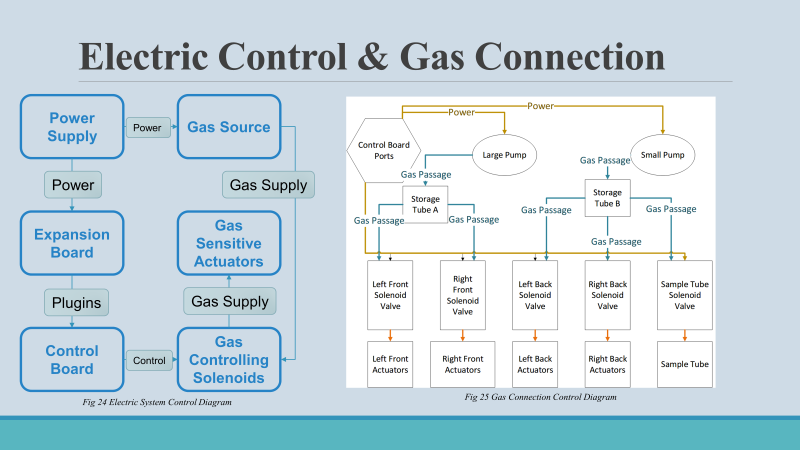
Pneumatic System#
- Dual air pumps (large + small) feed pressurized air through storage syringes
- 5 solenoid valves independently control four limb joints and one sampling cavity
- Pneumatic lines route through the body to each silicone soft-body joint
- Controller board manages valve sequencing for coordinated swimming gaits
Soft-Body Actuators#
- Gen 5 silicone soft-body joints — inchworm-shaped pneumatic actuators
- Multi-layer construction with embedded constraints for controlled deformation
- Louvered flipper design for asymmetric drag (power stroke vs. recovery stroke)
- Went through multiple design iterations with soft-body simulation, component testing, and full machine validation
Electronics & Control#
- Low-power ESP32-based control board
- Bluetooth connectivity for wireless operation via smartphone
- Expansion board kit for sensor integration
- Solenoid valve actuation timing controlled via firmware
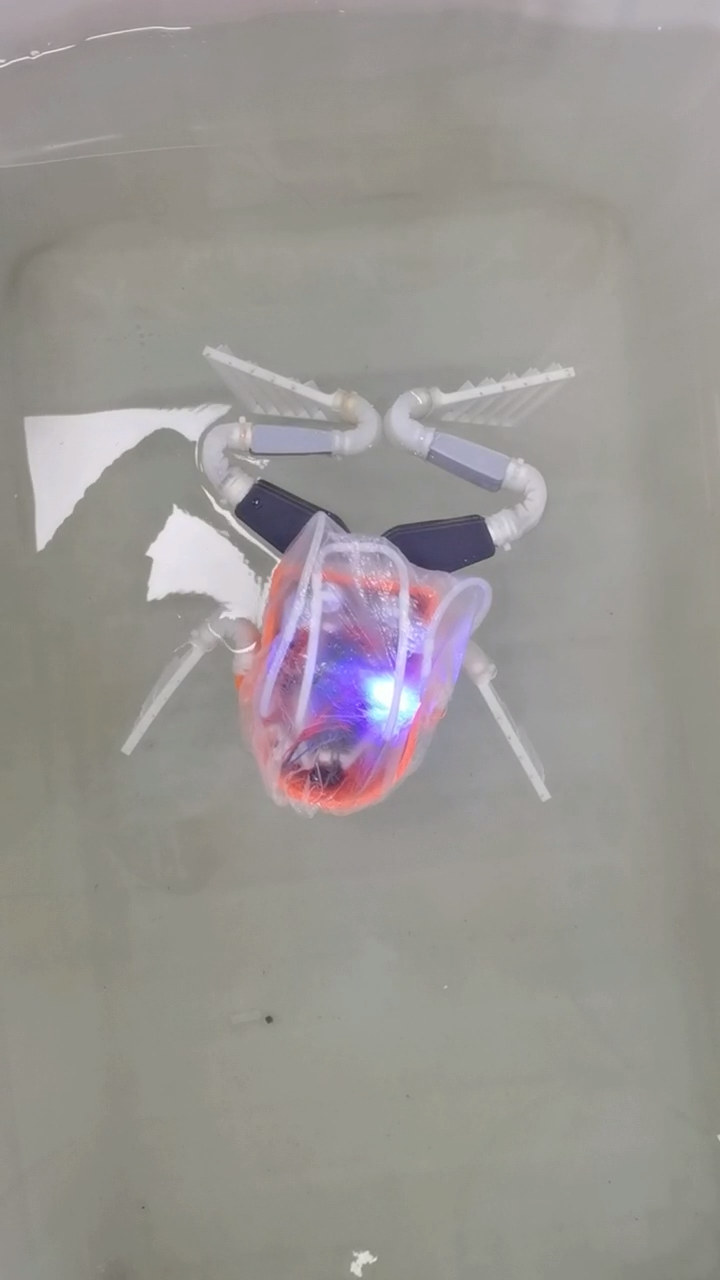
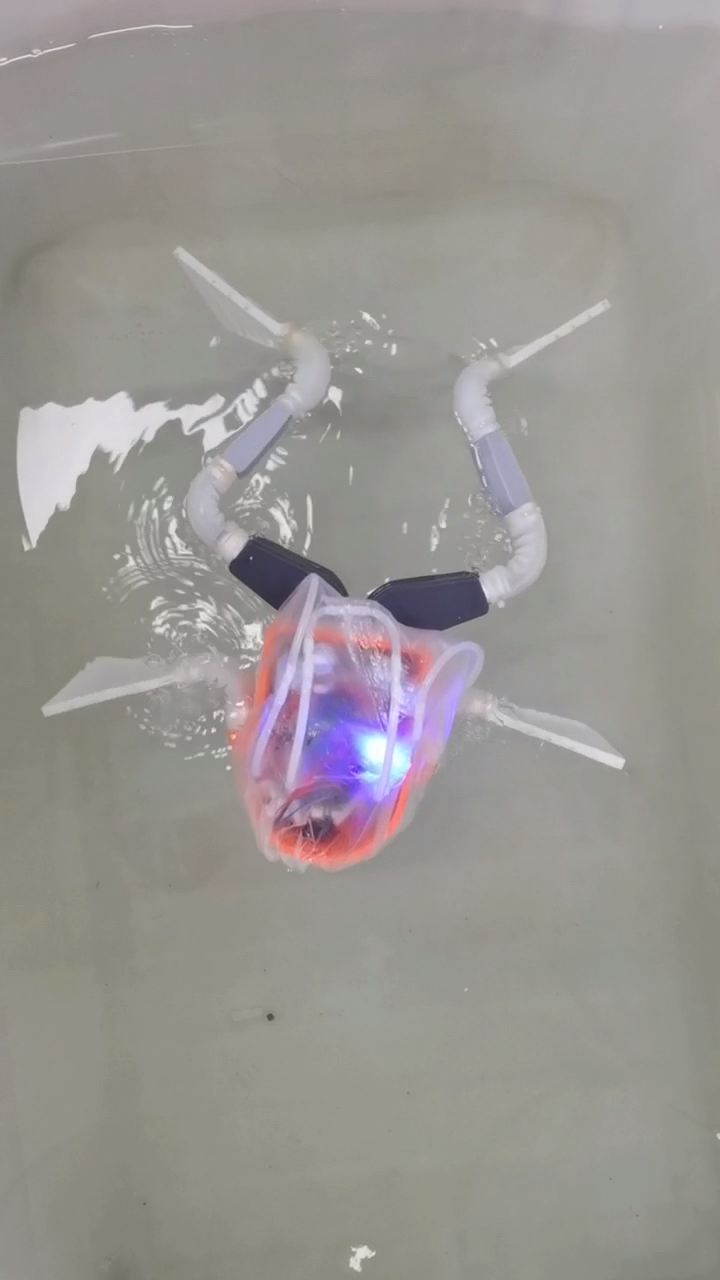
Swimming Performance#
The robot achieves a static water movement speed of approximately 0.04 m/s through coordinated limb actuation. Direction control is realized by differential timing of left and right limb strokes.
Quad Chart#
Key Results#
- Successfully verified the robot’s ability to maneuver on the water surface
- Capable of carrying a sampling tube for water data collection
- Wireless control via Bluetooth smartphone interface
- Sensor data reporting through onboard telemetry
Future Goals#
- Improve motion performance through refined soft-body joint geometry
- Optimize the resilient structure for greater water-surface compliance
- Expand commercial and educational platform potential
- Participate in further surface water robotics research
ISEF Display Board#
There are no articles to list here yet.