A 36-hour sprint.
Immersed in a current of Tough 2000 resin, attitude control, ISO bolts, and bus communication — we turned raw materials into an extraterrestrial rover.

The GT IEEE Robotech Hackathon might not be the biggest event, but it was my first real dive into an intensive hackathon-style build. Despite freezing rain and wind, everyone showed up. Our four-member team, TachyAstroach, kicked off the mission.
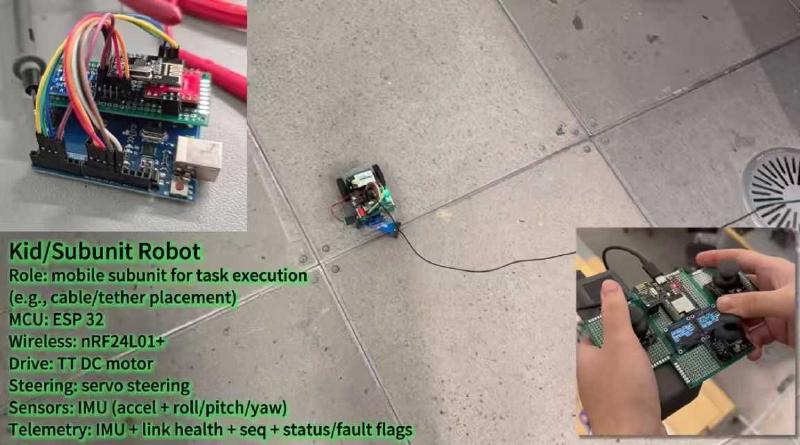
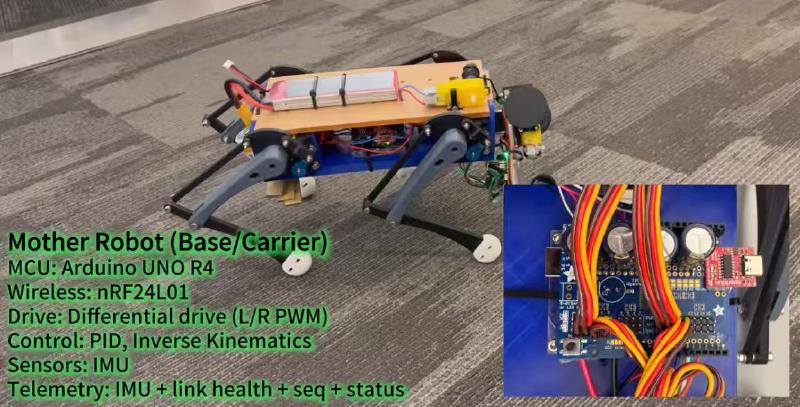
The plan: build a mother-daughter rover system — the “mother” rover launches the “daughter” sub-unit, each wirelessly coordinated with custom actuation and ejection mechanisms.
I led most of the mechanical design using Fusion 360, collaborating with teammates handling electronics, control algorithms, and communication interfaces. (More details available on our DevPost page.)
Working with such technically brilliant teammates was pure joy — the kind of trust where you could code and CAD back-to-back without missing a beat.
Exhausting? Absolutely. But deeply rewarding. Fueled by Lidl Diet Cola and a lot of teamwork, we CAD’d, cut, soldered, coded, and debugged through the night.
The result: a functioning rover prototype and, to our surprise, first place in the competition’s track — along with a $1,000 prize.

Couldn’t have done it without Peijie Liu’s circuitry magic, Zerun Wang’s control logic, and Aimee Yu Ting Zheng’s editing wizardry that saved the submission just in time.
This project reminded me why I love hands-on prototyping — fast, intense, and immensely fun.
This rover really was a blast.